Arduino
adalah kit elektronik atau papan rangkaian elektronik open source yang di
dalamnya terdapat komponen utama yaitu sebuah chip mikrokontroler dengan jenis
AVR dari perusahaan Atmel.

b. IC L293D
IC L293D adalah sirkuit terpadu (IC) dual H-Bridge driver untuk rangkaian motor DC. Driver motor ini bertindak sebagai penguat arus dengan mengambil sinyal kontrol arus rendah dan memberikan output ke sinyal kontrol arus yang lebih tinggi. Sinyal arus yang lebih tinggi ini lah yang digunakan untuk menggerakkan motor.

c. Motor DC
Motor
Listrik DC atau DC Motor adalah suatu perangkat yang mengubah energi
listrik menjadi energi kinetik atau gerakan (motion). Motor DC ini juga dapat
disebut sebagai Motor Arus Searah. Seperti namanya, DC Motor memiliki dua
terminal dan memerlukan tegangan arus searah atau DC (Direct Current) untuk
dapat menggerakannya.

d. Baterai
Baterai adalah perangkat yang terdiri dari satu atau lebih sel elektrokimia dengan koneksi eksternal yang disediakan untuk memberi daya pada perangkat listrik seperti senter, ponsel, dan mobil listrik. Ketika baterai memasok daya listrik, terminal positifnya adalah katode dan terminal negatifnya adalah anoda. Terminal bertanda negatif adalah sumber elektron yang akan mengalir melalui rangkaian listrik eksternal ke terminal positif. Ketika baterai dihubungkan ke beban listrik eksternal, reaksi redoks mengubah reaktan berenergi tinggi ke produk berenergi lebih rendah, dan perbedaan energi bebas dikirim ke sirkuit eksternal sebagai energi listrik.



#define in1 9 //Deklarasi pin 9 sebagai input 1
#define in2 10 //Deklarasi pin 10 sebagai input 2
#define duration
2000 //Deklarasi durasi 2000 ms
void setup(){ //Semua kode dalam fungsi ini di
eksekusi sekali
pinMode(in1, OUTPUT); //Deklarasi in1
sebagai OUTPUT
pinMode(in2, OUTPUT); //Deklarasi in2
sebagai OUTPUT
}
void loop() { //Semua kode dalam fungsi ini
dieksekusi berulang
digitalWrite(in1, HIGH); //in1
diberi logika 1
digitalWrite(in2, LOW); //in2 diberi logika 0
delay(1000); //Jarak waktu
1000 ms setelah input dieksekusi
digitalWrite(in1, LOW); //in1 diberi logika 0
digitalWrite(in2, LOW); //in2 diberi logika 0
delay(1000); //Jarak waktu
1000 ms setelah input dieksekusi
digitalWrite(in1, LOW); //in1 diberi logika 0
digitalWrite(in2, HIGH); //in2
diberi logika 1
delay(1000); //Jarak waktu
1000 ms setelah input dieksekusi
digitalWrite(in1, LOW); //in1 diberi logika 0
digitalWrite(in2, LOW); //in2 diberi logika 0
delay(1000); //Jarak waktu
1000 ms setelah input dieksekusi
}
6. Kondisi [kembali]
Percobaan 1 Kondisi 2: Buatlah vehicle mundur
Analisa
1. Bagaimana pengaruh baterai terhadap pergerakan motor?
Pada percobaan 1 ini baterai dihubungkan ke salah satu kaki motor drive IC L293D yaitu ke pin Vs. Baterai disini digunakan sebagai sumber tegangan tambahan bagi motor DC dimana sebelumnya motor DC telah mendapatkan tegangan sebesar 5V dari arduino, namun tegangan 5V tidak dapat memutar motor DC hingga kecepatan maksimum karena tegangan arduino kecil, untuk itu diperlukan penambahan tegangan dari baterai agar motor dapat berputar dengan kecepatan maksimal, karena tegangan minimum atau tegangan kerja dari motor yaitu 12 V. Baterai ini akan berpengaruh kepada motor, yaitu akan berpengaruh terhadap besarnya kecepatan dari motor. Jika nilai sumber tegangan pada baterai semakin besar maka kecepatan motor semakin cepat dan begitupun sebaliknya jika nilai sumber tegangan pada baterai semakin kecil maka kecepatan motor semakin lambat.
2. Jika tidak ada driver motor, apakah motor tetap bisa dijalankan?
Jika pada rangkaian percobaan 1 driver motor dihilangkan dan langsung menghubungkan ke arduino, maka motor tetap bisa dijalankan, hal ini dikarenakan pada program kita telah mengatur input HIGH dan input LOW nya sehingga motor tetap dapat berputar, namun untuk kecepatan perputaran tidak maksimal karena tegangan yang digunakan terbatas yaitu hanya sebesar 5 V dari arduino tanpa ada tambahan tegangan dengan bantuan baterai, karena baterai 12V tidak dapat dihubungkan ke pin VS di IC L293D, hal ini disebabkan karena tidak menggunakan driver motor. Driver motor L293D merupakan suatu IC khusus yang mampu untuk mengontrol motor DC. Pengontrolan motor yang dapat dilakukan ialah mengatur arah putaran motor yaitu berputar searah jarum jam dengan diberikan input (1,0) dan berputar berlawanan arah jarum jam dengan input (0,1), serta juga bisa memberhentikan motor dengan memberikan inputan yang sama (0,0) atau (1,1). Jika kita tidak menggunakan driver motor L293D, maka kita tidak bisa mengontrol arah motor seperti yang mampu dilakukan oleh driver motor L293D, yang bisa diatur hanyalah kecepatan putaran motor yaitu dengan memberikan masukan PWM yang lebih besar.
3. Berapa jumlah motor yang dapat dikendalikan arahnya oleh driver motor?
Driver motor IC
L293D biasa digunakan untuk mengendalikan 2 buah
motor DC. IC ini juga sering disebut H-bright driver motor DC. IC L293D
dirancang untuk mengendalikan 2 motor DC dengan 2 arah putaran yaitu searah jarum jam serta berlawanan jarum jam
dan kecepatan putar motor. Berikut merupakan tabel kontrol arah putar motor:
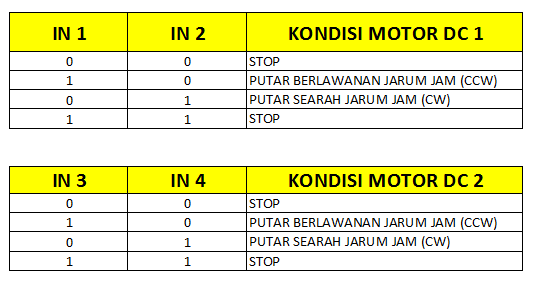
Jika
IN1 diberi logika
1 dan IN2 diberi logika
0, maka motor A akan berputar kebalikan arah jarum jam. Dan sebaliknya jika IN1
diberi logika
0 dan IN2 diberi logika
1, maka motor A akan berputar searah jarum jam. Jika memberi logika 1 atau 0 pada IN1 dan IN2 bersamaan,
Motor A akan berhenti (Pengereman Secara Cepat). Begitu juga dengan motor
B. Sementara untuk mengatur kecepatan motor adalah dengan mengatur input dari
enable 1 (pin1) dan enable 2 (pin9) menggunakan PWM (Pulse Width
Modulation).
File Rangkaian
Video Simulasi Rangkaian
Listing Program
Flowchart
Library Arduino UNO
Datasheet Arduino UNO
Datasheet IC L293D
HTML
Tidak ada komentar:
Posting Komentar